货车转向架分解、组装自动化装备关键技术与系统集成研究
发布时间:2025-11-08 16:07
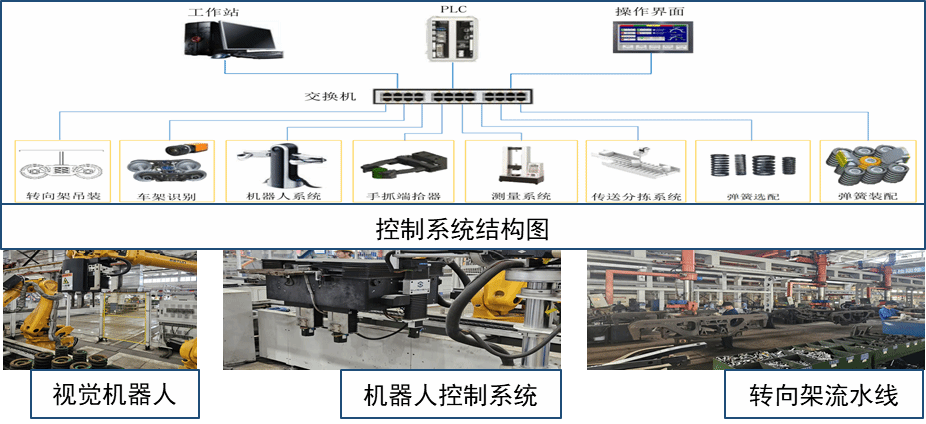
与郑州铁路局合作攻关,研制转向架流水线自动分解装置。通过对转向架分解、组装过程中的核心环节如:架构分解、螺栓拧紧、部件转运等,采用移动机器人(AGV)、机器视觉定位及多机器人协同控制技术,构建自动化流水线作业系统。研究基于深度学习的部件图像识别与定位算法,开发高精度扭矩控制轴端控制器,结合工艺知识与监测信息融合技术,实现转向架拆装过程的精准管控与全流程数据追溯。
在此基础上构建智能化、柔性化的转向架分解流水线,为提升转向架检修效率、降低人工依赖、保障作业安全提供技术支撑。